La planificació i disseny adequat del sistema de càrrega en moviment per a vehicles elèctrics, té el potencial de permetre que els vehicles realitzin un viatge que suporti les càrregues (rang de conducció il·limitat i temps d'aturar el cotxe, nul) amb un cost global mínim.
Hi ha un equilibri entre la potència del sistema i la cobertura de la carretera. El sistema de baix consum requereix electrificar una gran longitud de carreteres, cosa que augmenta el cost de la infraestructura. Un sistema d’alta potència requereix components potents, que podrien ser inviables a causa de les limitacions tecnològiques.
 |
| Font: Ecolventos |
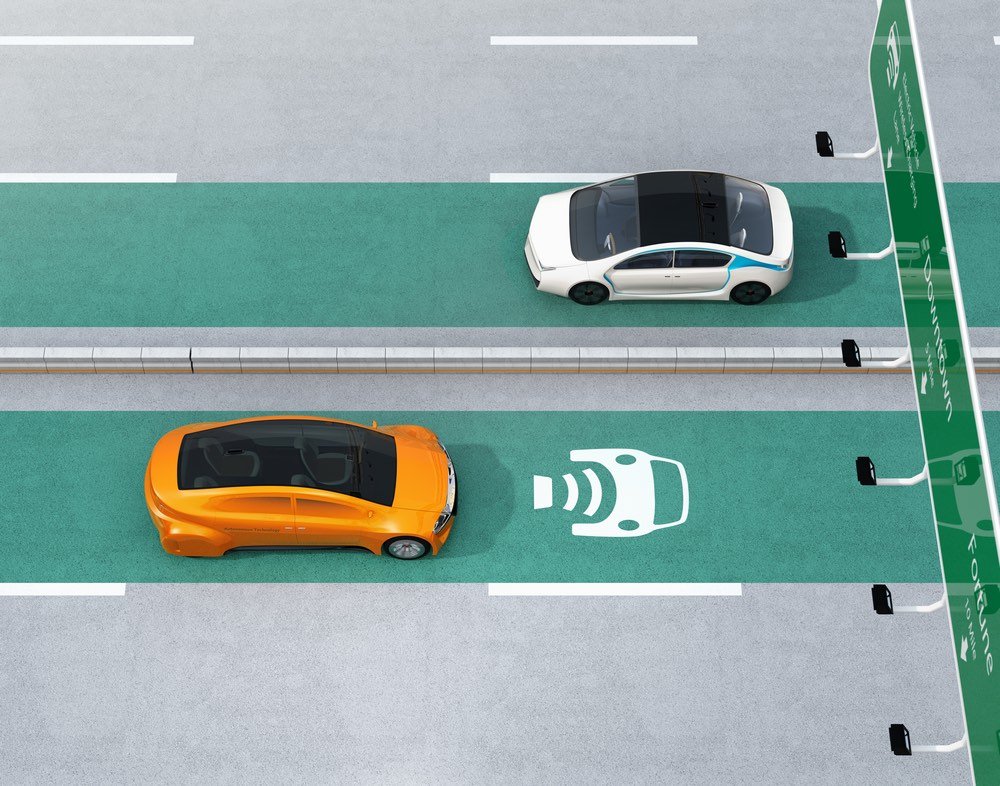
El mercat de vehicles elèctrics (EV), està creixent ràpidament a causa dels avantatges que ofereixen en termes de seguretat, comoditat, economia de combustible, cost operatiu, manteniment i emissions. Tanmateix, els principals reptes per a l'adopció dels vehicles electrics són el límit de les hortes de conducció i el temps llarg que cal per la recàrrega. Els EV actuals, tenen com a objectiu una autonomia de250 - 450 km i un temps de recàrrega que oscil·la entre els 30 minuts i gairebé un dia complet, depenent de les tecnologies de la bateria i el carregador. Una manera de superar aquests reptes és instal·lar una gran bateria en el cotxe i una capacitat de càrrega estacionària (durant la nit) per fer la recàrrega. Aquest carregador estacionari pot ser de corrent alter o corrent continu o per inducció sense cables gràcies a la tecnologia de transferència inductiva de potència (IPT) o tecnologia de transferència de potència capacitiva (CPT)], tal com s’indica a la figura 1.

Una gran bateria, augmenta els costos d’explotació del vehicle i requereix carregadors ràpids perestar un temps raonable per fer una recàrrega. Una altra solució és desplegar una càrrega en ruta de manera que un EV es pugui carregar durant les seves parades o fins i tot, mentre es mou. Ambdues tecnologies, la dinàmica i la quasi dinàmica, poden ser amb cables o sense cables, tal com es descriu a la figura 1. Aquesta solució té el potencial d’ampliar de forma considerable el rang de conducció, permetre l’ús d’una bateria a bord més petita (amb la qual cosa es redueix la el cost, la mida i el consum d'energia del vehicle), i teòricament eliminar el temps d’inactivitat de la recàrrega (mitjançant la realització d’operacions de suport de càrregues contínues). La càrrega quasi dinàmica, és ideal per a carreteres secundàries per la disponibilitat de parades transitòries i zones de conducció de baixa velocitat. En aquest cas, un vehicle podria recuperar energia suficient amb una infraestructura de càrrega de baixa potència i poca cobertura. Tanmateix, a les autopistes amb una conducció contínua i a gran velocitat, només és possible amb la càrrega en moviment. La càrrega en moviment és una tecnologia que permet a un EV carregar la seva bateria durant el moviment mitjançant l'electrificació de la calçada, ja sigui mitjançant línies elèctriques amb pantògraf, rails conductors amb contactes lliscants o tecnologia de càrrega per inducció i sense fils, tal com es mostra a la Fig-1.
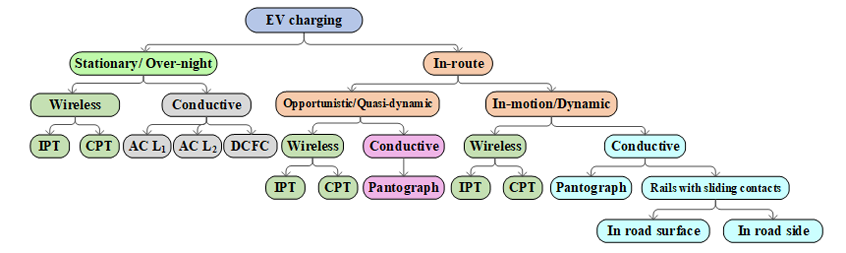 |
| Fig. 1: Tecnologies de càrrega EV. |
Planificació del sistema de càrrega en moviment.
Independentment de la tecnologia d’electrificació per carretera, un disseny adequat del sistema de càrrega dinàmic, pot permetre als EVs realitzar una operació que suporti la càrrega amb un rang il·limitat i temps sense necessitar aturar per carregar utilitzant una petita bateria a bord. A més, pot reduir significativament el cost de la infraestructura associada als convertidors de potència, materials, treballs d’estructura, instal·lació, etc., i el cost del vehicle associat a la mida de la bateria i al nombre de vehicles de la flota a causa de l’augment de les hores d’operació.
Teòricament, l'energia subministrada per un carregador en moviment és funció de la potència del carregador, la longitud del trajecte i la velocitat de conducció. Per a les necessitats d’un determinat vehicle (energia i velocitat), es pot instal·lar un carregador d’alta potència, de poca cobertura o un sistema de baixa cobertura de baixa potència. El primer mostra un elevat cost unitari, un nombre reduït d’unitats, un elevat cost de la bateria i un baix cost de construcció. Aquest últim experimenta el contrari. Per tant, la planificació adequada del sistema és crucial per decidir el nivell de potència adequat, la cobertura de la carretera, la capacitat de la bateria i ubicació i longitud dels segments electrificats. Els objectius principals per al disseny del sistema, són permetre que els EV realitzin una operació que suporti càrregues amb un cost global mínim. Per tant, es desenvolupa un model d’estimació d’energia lineal per a l’operació que suporti la càrrega, tenint en compte la dinàmica i la potència del carregador del vehicle, tal com es mostra a la Fig. 2. En aquest cas, la bateria del vehicle manté un nivell d’energia fixa amb una finestra de funcionament amb un SOC estret ( ΔSOC = 10-20% ). El model inclou kWh / milla del vehicle, velocitat de conducció, capacitat de bateria ( Qb ), longitud del segment electrificat [ LE (milla)] i potència del carregador ( PC ).
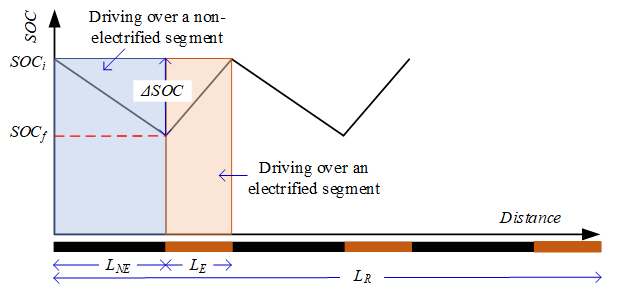 |
| Fig. 2: Model d'energia lineal per a l'operació que manté les càrregues. |
Entre les diferents tecnologies de càrrega en moviment, la càrrega dinàmica sense fils presenta més avantatges respecte a altres:
1) és interoperable de manera que es pot utilitzar el mateix sistema amb vehicles diferents,
2) és automàtic i senzill en funcionament,
3) no funciona. no té impacte visual, i
4) és més segur a causa de l'eliminació de conductors energitzats exposats i la connexió mecànica.
S’aconsegueix una anàlisi de planificació del sistema de suport dinàmic de la càrrega sense cables dinàmica mitjançant la resolució del model de suport de càrregues a la figura 1 per a vehicles de passatgers a les autopistes, com la major quantitat de quilòmetres de vehicles recorreguts als EUA. La velocitat mitjana de kWh i la velocitat de conducció dels vehicles es calcula mitjançant les dades reals disponibles al Laboratori Nacional d'Energies Renovables (NREL).
La relació entre els paràmetres de dissenys claus del sistema ( δ, Pc i Qb ) es descriu a les Figs. 3-5. A una capacitat de bateria fixa ( Qb = 30 kWh), la cobertura de carretera del sistema és inversament proporcional al seu nivell de potència (Fig. 3), cosa que significa que un sistema d’alta potència requereix menys cobertura de carretera i menys construcció i materials, però unitats més cares.
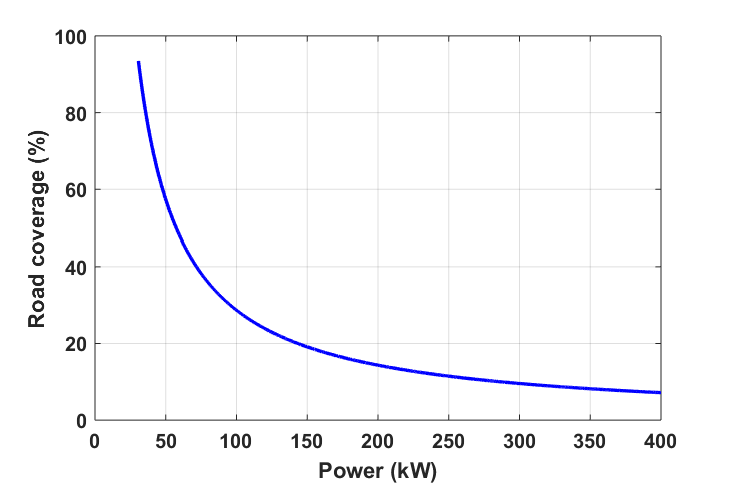 |
| Fig. 3: Cobertura de la carretera respecte a la potència de càrrega @ Q b = 30kWh |
La variació de la cobertura de la carretera amb la capacitat de la bateria per a una potència de càrrega fixa ( Pc = 100 kW) es presenta a la Fig. 4, que mostra una relació proporcional lineal. L’augment de Qb requereix més cobertura de carretera per compensar l’augment del consum d’energia del vehicle. A la figura 5 s’analitzen els tres paràmetres de disseny que mostren que augmenta. La reducció de PC i la reducció de Qb comporta la menor cobertura viària i el cost d'infraestructura. Tanmateix, aquesta configuració del sistema requereix una bateria que pugui suportar una taxa de càrrega molt elevada, cosa que pot ser inviable.
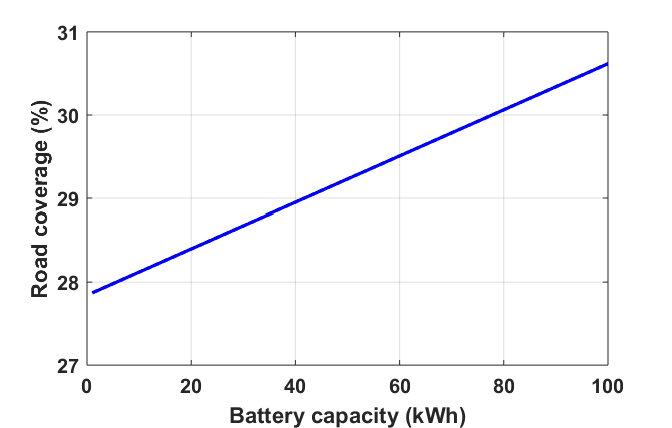 |
| Fig. 4: Cobertura de la carretera respecte a la capacitat de la bateria @ P c = 100 kW. |
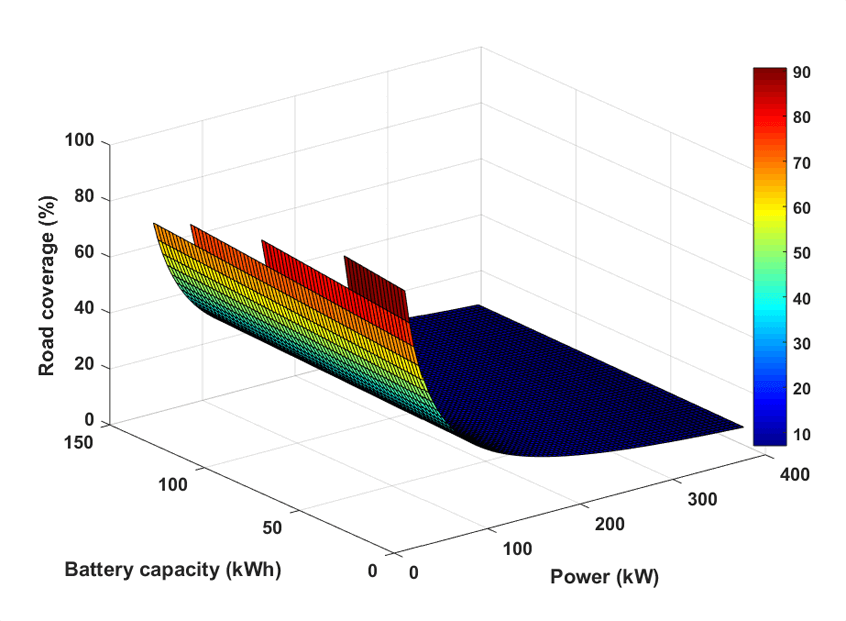 |
| Fig. 5: Cobertura de carretera, energia de càrrega i capacitat de bateria. |
Conclusió
S'han introduït les diferents tecnologies de càrrega per als SVE, incloses les estacionàries, dinàmiques i quasi dinàmiques. S'ha vist que és important els reptes del disseny del sistema de la càrrega dinàmica mitjançant un model energètic lineal per al funcionament que suporti la càrrega. Com a cas d'estudi, cal estudiar la planificació de la càrrega dinàmica sense fils per als turismes a les carreteres. Els resultats mostren que un sistema de baixa potència requereix una cobertura vial elevada, cosa que augmenta el cost de la infraestructura. Un sistema d’alta potència pot reduir significativament la cobertura de la carretera, però requereix components potents (convertidors i bateria), que poden ser inviables a causa de les limitacions de la tecnologia
Font:IEEE Smart Grid