Un nou sistema s'ha dissenyat, basat en diverses tecnologies, que permet estalviar entre dues i tres hores les esperes en els encreuaments de les carreteres i carrers, el que significa que es podrien estalviar unes 22 hores al mes.
 |
| Font:Foto: Dan Saelinger |
Una d'elles, és la connexió sense fils entre vehicles. Sovint s'anomena tecnologia vehicle-to-vehicle (V2V), encara que aquesta vinculació també pot incloure senyals de trànsit i d'altres infraestructures.
Una altra tecnologia emergent és la del vehicle autònom, que, per la seva naturalesa, hauria de minimitzar el temps dels desplaçaments.
Després hi ha la Internet of Things (IoT), que connectarà no només amb els 7 mil milions de persones del món, sinó també amb altres 30 mil milions de sensors i gadgets que s'espera hi hauran desplegats.
Totes aquestes tecnologies poden treballar conjuntament amb un algoritme que s'ha desenvolupat en la Carnegie Mellon University, a Pittsburgh. L'algorisme permet que els cotxes col·laborin, utilitzant les seves capacitats de comunicació de a bord, per fer possible que el trànsit funcioni sense problemes i sense semàfors.
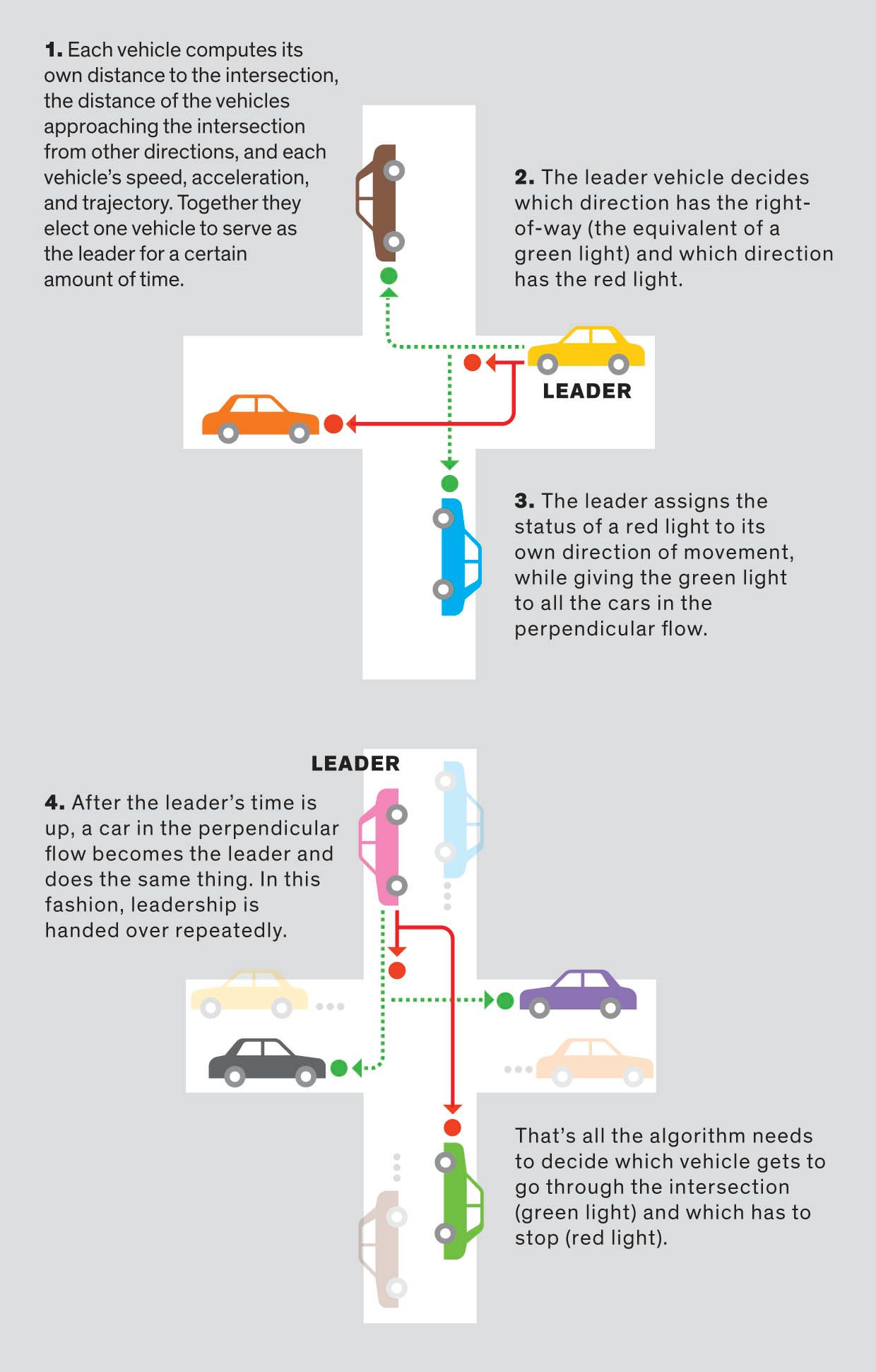 |
| Il·lustració: Anders Wenngren |
Aquest projecte l'ha començat una empresa anomenada Virtual Traffic Lights (VTL), i s'ha provat de forma exhaustiva en simulacions, en un projecte privat a les carreteres properes al campus de Carnegie Mellon. Al juliol, per primera vegada, es va presentar en públic la tecnologia del VTL a l'Aràbia Saudita, davant un auditori d'uns 100 científics, funcionaris del govern i representants d'empreses privades.
Els resultats d'aquest assaig van confirmar el que ja s'havia sospitat: és hora de fer desaparèixer els semàfors. No hi ha res a perdre, excepte un munt d'hores assegudes als cotxes sense fer res.
El principi que hi ha darrere del semàfor ha canviat poc, ja que aquest dispositiu es va inventar en el 1912 i es va desplegar a Salt Lake City, i dos anys més tard, a Cleveland. El seu funcionament, te un enfocament basat en el cronòmetre, per la qual cosa a vegades es pot estar esperant darrere d'una llum vermella en una intersecció quan no hi ha altres cotxes propers. La temporització, es pot ajustar per adaptar els patrons de trànsit als diferents punts del cicle de desplaçament, però això no és suficient. Com a conseqüència, diàriament molta gent perd molt de temps.
En comptes d'això, es podria visualitzar una sèrie d'automòbils que s'apropen a una cruïlla i es comuniquen entre si amb la tecnologia V2V. Junts decideixen i després elegeixen un vehicle per funcionar com a líder durant un període determinat, durant el qual es decideix quina direcció tindrà dret de pas, l'equivalent a la llum verda, i quina direcció tindrà la llum vermella.
Llavors, qui té preferència? És molt senzill. El líder assigna l'estat d'una llum vermella a la seva pròpia direcció de moviment mentre dóna llum verda a tots els cotxes que estarien en el flux normal. Després, transcorreguts, per exemple 30 segons, un altre cotxe que estigui en el flux normal, es converteix en nou líder i fa el mateix. D'aquesta manera, el lideratge es reparteix repetidament, de forma cíclica, per compartir la responsabilitat, ja que ser líder implica que ha sacrificar quelcom pel bé comú.
Amb aquest enfocament, no caldrien semàfors. Els treballs de regulació del trànsit quedarien diluïts en les infraestructures sense fils.
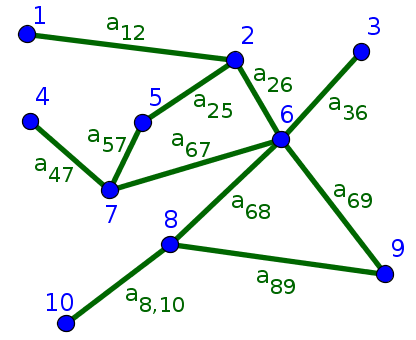
L'algoritme de l'empresa VTL, escull als líders consultant paràmetres com són, la distància del vehicle davanter en cada carrer des del centre de la intersecció, la velocitat dels vehicles, el nombre de vehicles en cada carrer, etc. Quan tot és igual, l'algoritme selecciona al del vehicle més allunyat de la intersecció, de manera que tindrà temps suficient per disminuir la velocitat. Aquesta política garanteix que el vehicle més proper a la intersecció tingui preferència.
És important tenir en compte que la tecnologia VTL no necessita cap càmera, ni radar o control. Obté tota l'orientació que necessiti d'un sistema sense fil anomenat comunicacions dedicades de curt abast.
El
dedicated short-range communications (DSRC) fa referència a programes de ràdio, incloent l'ample de banda dedicat, que es van desenvolupar als Estats Units, Europa i Japó entre el 1999 i 2008 per permetre que els cotxes propers es comuniquin sense fils. Els desenvolupadors del DSRC van concebre diversos usos, incloent la col·lecció de peatge electrònic i el control cooperatiu adaptatiu de creuer, i també la funció que s'utilitza per a evitar la col·lisió.
Molt pocs cotxes, estan equipats amb transceptors DSRC (i és possible que la tecnologia sense fils 5G substituirà la DSRC ). Però aquests transceptors estan fàcilment disponibles i proporcionen tota la funcionalitat que es necessita. Aquests transceptors, dissenyats per fer ús del IEEE Standard 802.11p, es basen en que cadascun ha d'enviar un missatge de seguretat bàsic cada deu fraccions de segon. El missatge diu als destinataris a on el vehicle que transmet està en latitud, longitud i el seu encapçalament. Si s'executa en un processador d'un vehicle, l'algoritme VTL recull les dades d'aquest vehicle, llença el que rep dels vehicles veïns i superposa el resultat a lectures d'aquests serveis de cartografia digital com pot ser el Google Maps, Apple Maps o OpenStreetMap. D'aquesta manera, cada vehicle pot calcular la seva pròpia distància a la intersecció, així com la distància dels vehicles que s'aproximen a la intersecció des de les altres direccions.
També es pot calcular la velocitat, l'acceleració i la trajectòria de cada vehicle. És tot això que l'algoritme ha de decidir per poder saber qui passa per la intersecció (llum verda) i qui ha de parar (llum vermella). Una vegada que s'ha pres la decisió, una pantalla instal·lada a cada cotxe mostra la llum al conductor des d'una posició de visió normal. Per descomptat, l'algorisme VTL només resol el problema de gestionar el trànsit en les interseccions. No condueix el cotxe. Però quan es treballa dins del seu propi domini, el VTL pot fer tot a un cost molt més baix que la tecnologia dels vehicles autònoms.
 |
| Font: Dan Saelinger |
Els cotxes de conducció automàtica requereixen molta més capacitat de computació per donar sentit als feeds de dades individuals que provenen del seu lidar, radar, càmeres i altres sensors, i encara més per fusionar aquests feeds en una sola vista de l'entorn. Però quan es treballa dins del seu propi domini, el VTL pot fer tot a un cost molt més baix que la tecnologia de vehicles autònoms.
Aquest mètode esdevé com la substitució d'una regla per la veritable intel·ligència. L'algoritme de VTL permet que els cotxes controlin el seu propi tràfic tant com ho fan les colònies d'insectes i bancs de peixos. Una banc canviant de peixos es dirigeix tot alhora, sense cap mestre directiu dirigint els membres del banc; en canvi, cada peix s'adapta al moviment dels seus immediats veïns.
Aquest és un exemple del comportament del sistema completament distribuït en lloc d'un comportament centralitzat de xarxa. Amb això, les flotes de vehicles d'una ciutat poden gestionar el trànsit per ells mateixos sense un mecanisme de control centralitzat i sense cap intervenció humana: cap policia, cap semàfors, cap senyal de parada.
Una primera idea era col·locar una bobina magnètica sota la superfície d'asfalt d'una carretera per detectar l'aproximació dels vehicles al llarg d'una única ruta cap a una intersecció i ajustar la durada del semàfor. De la mateixa manera, les càmeres situades a les interseccions es poden utilitzar per calcular el millor moment dels semàfors en una intersecció. Però ambdues tecnologies són cares d'instal·lar i mantenir i, per tant, només s'han instal·lat en algunes interseccions.
Al executar l'algoritme VTL en un model virtual per a dues ciutats: Pittsburgh (EUA) i Porto (Portugal), es va recollir les dades de trànsit de l'Oficina del Cens dels EUA i l'agència portuguesa corresponent, també, s'han afegit dades de mapes de Google Maps i s'han inclòs totes les dades a SUMO, la Simulació de Mobilitat Urbana, un paquet de programari de codi obert desenvolupat pel Centre Aeroespacial Alemany.
SUMO va simular els desplaçaments en hora punta en dos escenaris, un amb els semàfors existents i l'altre utilitzant l'algoritme VTL. Es va trobar que el VTL va reduir el desplaçament mig en 21,3 minuts dels de 35 minuts a Porto i en 18,3 minuts dels 30,7 minuts a Pittsburgh. Les reduccions per a persones que viatgen a la ciutat des dels suburbis i més enllà es van reduir en un mínim del 30 per cent i un màxim del 60 per cent.
Aquests estalvis temporals foren principalment per dos motius. En primer lloc, el VTL va eliminar el temps d'espera en semàfor vermell quan no hi havia cotxes que creuaven. En segon lloc, el VTL va introduir el control del trànsit a totes les interseccions, no només aquelles que tenen senyals actives. Per tant, no era necessari que els cotxes s'aturessin en un senyal de stop, per exemple, quan no hi hagués altres cotxes.
Les simulacions van mostrar altres beneficis, que són indiscutiblement més importants que estalviar temps. El nombre d'accidents es va reduir en un 70 per cent. A més, minimitzant el temps transcorregut en les interseccions el VTL redueix de forma mesurable la petjada mitjana de carboni que provoca l'automòbil.
Llavors, quan estarà disponible la tecnologia VTL? Per començar, s'hauria d'aconseguir que el DSRC s'incorpori en el procés de fabricació dels cotxes. El 2014, l' Administració Nacional de Seguretat Viària de Carreteres dels EUA va proposar l'adopció de la tecnologia, però l'administració de Trump encara no ho va implementar de manera que, no està clar quina serà la decisió final. Així doncs, els fabricants nord-americans ara poden mostrar-se reticents a instal·lar transceptors DSRC, atès que aportarien costos a un cotxe i que només serien útils si altres cotxes també ho incorporen.
Fins que hagin suficients cotxes que incorporin els dispositius, l'escala de fabricació es mantindrà baixa i serà car. Als Estats Units, només General Motors ha començat a posar DSRC en automòbils, tots ells Cadillac de gamma alta. No obstant això, a Europa i Japó les perspectives són molt més favorables. Una sèrie de fabricants europeus s'han compromès a posar els transceptors en els seus cotxes, de manera que a recentment al Japó, el govern ha recolzat fermament la tecnologia, fet que ho demostra que el gegant automobilístic Toyota va reiterar el seu compromís.
I encara que el DSRC fracassi completament, l'algoritme VTL es podrà implementar amb altres tecnologies sense fils, com ara 5G o Wi-Fi.
Font: Carnegie Mellon University

 La resiliència es defineix com "un mitjà per resistir i recuperar-se ràpidament donada una interrupció". La "xarxa elèctrica del futur" ha de ser resilient, per tant, també ho han de ser les subestacions elèctriques per poder operar de forma segura i fiable, independentment dels entorns on estiguin localitzades. Els esforços de millora de les xarxes elèctriques, han de permetre millorar la fiabilitat de les subestacions i també, millorar de manera inherent una determinada resposta d'emergència perquè així, sigui possible millorar les estratègies de restabliment del servei elèctric relacionades amb les avaries produïes per causes naturals o humanes que podrien malmetre les subestacions elèctriques.
La resiliència es defineix com "un mitjà per resistir i recuperar-se ràpidament donada una interrupció". La "xarxa elèctrica del futur" ha de ser resilient, per tant, també ho han de ser les subestacions elèctriques per poder operar de forma segura i fiable, independentment dels entorns on estiguin localitzades. Els esforços de millora de les xarxes elèctriques, han de permetre millorar la fiabilitat de les subestacions i també, millorar de manera inherent una determinada resposta d'emergència perquè així, sigui possible millorar les estratègies de restabliment del servei elèctric relacionades amb les avaries produïes per causes naturals o humanes que podrien malmetre les subestacions elèctriques.